
2026.02.24
人事・総務にとって春の異動は「修羅場」。AIパンチャーでミスなく切り抜ける!
こんにちは。常盤産業ブログ担当 上野です。 もうすぐ春ですね。出会いと別れの季節でもあるこの季節を前に「修羅場」を迎える部署があります。それは、人事と総務を担う部署です。 年度末・年度初めの「スタッフの異動」に伴うデータ入力が激増し、担当者は目が回るほど忙しくなります。重要な内容だけに入力ミスも許されず、そのプレッシャーは相当です。これはもう「修羅場」といってもよいでしょう。 今回は、そん…
投稿日:2026.04.01 最終更新日:2026.04.01

こんにちは。常盤産業ブログ担当 上野です。
「ロボットを導入したいけど安全柵を設置するスペースがない」「協働ロボットを導入したいけどスピードが遅くて生産性に期待できない」「協働ロボットが安全のために停止する度、再起動する人手が必要で手間がかかる」 自働化に関して、このようなご相談をいただくことがよくあります。人手不足の解消が期待できるロボットですが、いざ導入するとなると、安全のために何かを「我慢」せざる得ないのがこれまでの常識でした。
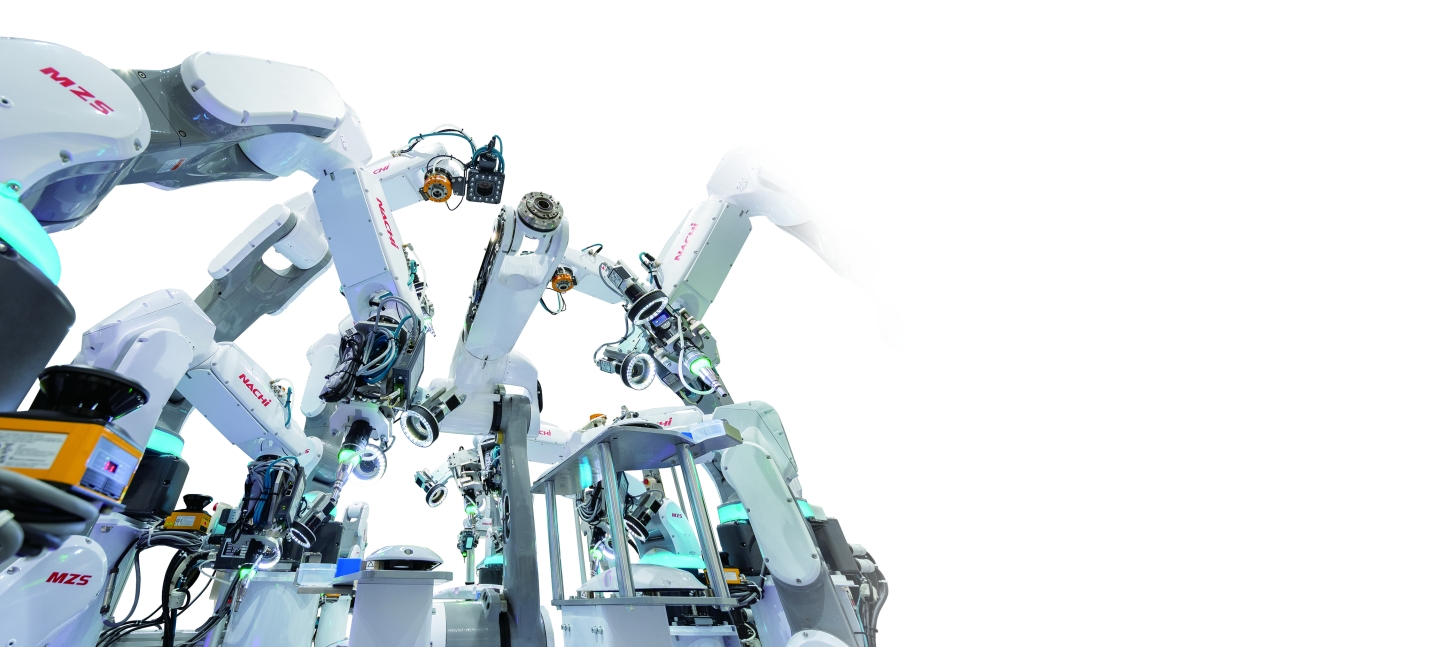
しかし、これらの「我慢」が不要で、より安全に動く協働ロボットが不二越社から誕生しました。国内初のぶつかる前に停止する協働ロボット「MZS05」です。
今回は、MZS05についてご紹介します。
目次
これまでの協働ロボットは、人やものに「ぶつかってから」止まるものでした。しかし、このMZS05は、ぶつかる前に自ら止まります。事故の衝撃を最小限にするのではなく、事故そのものを起こさないようにすることで事故のリスクを低減します。
その理由は、「接近センサ」「トルクセンサ」「レーザスキャナ」の3つセンサを標準装備しているからです。
アームに内蔵されており、人やものが400mm~500mmまで接近すると停止するセンサ
これまでの協働ロボットにも搭載されている接触時の衝撃を察知して停止するセンサ
ロボットの足元に設置され、設定範囲内に人やものが入るとロボット先端部が停止するセンサ
3つの安全センサがあるからこそ、「ぶつかる前に停止」できるのです。
しかもこれらのセンサは標準装備されています。
これまでの協働ロボットは、停止するたびに手動で再起動操作が必要でした。現場のスタッフが自身の作業をしながらロボットの操作もしなければならず、大きな「手間」となっていました。
しかし、MZS05は、停止した後に安全が確認できれば、自動で再開します。もう、再起動のためにロボットに呼び出されることはありません。
しかも1台で、「通常ロボットモード」と「協働ロボットモード」を切り替えて使えます。稼働モードはベース部分のランプの色で確認できるので、遠くからでも一目で確認できます。

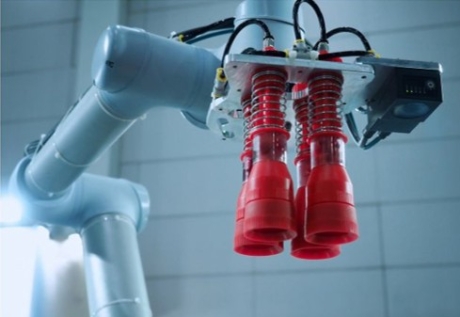
実際の様子を動画でもご覧いただけます。
協働ロボットは人と共に働くため、安全確保のために動作が遅いのが一般的でした。しかし、MZS05は、動作が速いのが特徴です。
それは、3つのセンサでぶつかる前に止まることができる安全性があるからこそ。だからこの速さを実現できました。 一般的な協働ロボットと比べると、その差は歴然です。
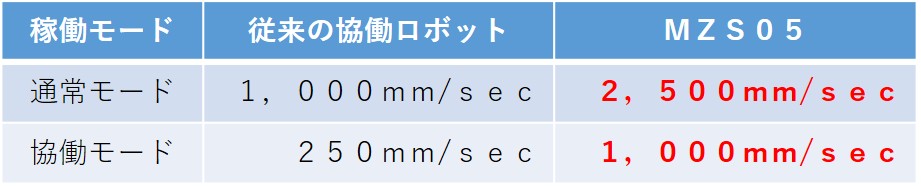
協働ロボットモードで「毎秒1,000mm」は、驚きのスピードです。
しかも、不二越社のベストセラー産業用ロボット「MZシリーズ」と共通のメカニズムを採用しているため、精度の高さは保証付きです。 精密な組み付け作業や高速タクトが要求される現場でも実力を発揮する高い剛性。
「協働ロボットが、通常のロボットに性能で劣る」というのはもう過去のことのようです。
これまでロボット導入を検討する際、「生産性を重視して人と距離をおいて働く通常ロボットか、スピードを我慢して人と共に働く協働ロボットか」という究極の選択を迫られてきました。
しかし、MZS05なら1台でモードを使い分けられ、スピードも妥協する必要がありません。安全性と生産性を両立させることができます。

といった具体的なご相談もお聞かせください。
これから先も生産性と品質を維持するために、最善の選択肢をご提案いたします。
ご連絡お待ちしています。
2026.02.24
こんにちは。常盤産業ブログ担当 上野です。 もうすぐ春ですね。出会いと別れの季節でもあるこの季節を前に「修羅場」を迎える部署があります。それは、人事と総務を担う部署です。 年度末・年度初めの「スタッフの異動」に伴うデータ入力が激増し、担当者は目が回るほど忙しくなります。重要な内容だけに入力ミスも許されず、そのプレッシャーは相当です。これはもう「修羅場」といってもよいでしょう。 今回は、そん…

2026.02.19
こんにちは。常盤産業のブログ担当 上野です。 「品質の維持」「納期の厳守」「安全の確保」…。製造業の“当たり前”を守り続けるのは、なかなか過酷なものです。その大きな要因のひとつに「人」の問題があります。 「退職者が出るたび、これからどうやってラインを回そうかと頭を抱えてしまう」「新しいスタッフが入ってもすぐに辞めてしまう。そもそも募集しても人が集まらない」 もし、このような状況に心当たりがあるな…

2026.01.30
こんにちは。常盤産業ブログ担当 上野です。 製品の仕上がりを大きく左右する工程のひとつに「下地処理」があります。これまでは、表面をゴシゴシと削る研磨作業や薬品洗浄が一般的でした。 しかし、こうした方法は、「母材を傷つけてしまう可能性」や「環境・作業者の安全面への負担」といった課題がありました。 そんな中、近年注目されているのが、レーザー光で汚れを落とす「レーザークリーナー」です。微細な隙間…
2026.01.19
こんにちは。常盤産業 上野です。 ロボットアームの調整中に、次のようなトラブルはありませんか? 滑ってつかめない 引っかかって部品を落とす 「もうちょっと右…あともう少し…」と、まるでUFOキャッチャーをしているように感じることもあるかもしれません。しかし、これは遊びではなく仕事の話。 生産性やコストに直結するため、ロボットにはしっかりとつかんでもらわないと困ります。 つい「もう自分…

2025.12.15
こんにちは。常盤産業のブログ担当 上野です。 工場の設備の「最近、なんだか振動や音が大きくなった…」という変化、見逃していませんか?それは、知らず知らずのうちに進行している金属摩耗のサインかもしれません。 今回は、こうした課題を解決し、低コストかつリアルタイムで金属摩耗を発見できる画期的な保全についてご紹介します。 回転部の金属摩耗チェック 工場の設備が稼働するたびに、避けられないのが…

2025.11.28
こんにちは。常盤産業ブログ担当 上野です。 現場で、よく似た形のものをうっかりと間違えてしまうことがあります。しかし、これは絶対に避けたいこと。 例えばピザを注文したとき、トッピングにピーマンを選んだのにハラペーニョがのったものが届けられたら…。 待ちかねていたピザが注文と違ったものだったら、「頼んだものと違う」とテンションが下がるだけでなく、子どもが食べてしまったら大変です。 もう、次…

2025.11.04
「数千万円の投資をして、本当に元が取れるのか?」 「初期費用だけでなく、運用費用も含めるといくらかかるのか?」 目視検査の自動化を検討する際、多くの経営層や現場責任者がこのような投資対効果に関する疑問を抱えています。 結論から言えば、目視検査の自動化におけるROI(投資利益率)は5年後で150~200%、投資回収期間は3~5年が標準であり、費用対効果は十分に見込めます。 これは、製造業における工場自動化の一般…

2025.11.03
「キーエンス社、コグネックス社、オムロン社...。メーカーが多すぎて、結局どう選べばいいかわからない」 目視検査の自動化を検討している方なら、一度は抱いたことのある悩みではないでしょうか。 精度、費用、導入難易度など判断要素が多すぎて、一社に決めきれない。しかも高額投資になるため、失敗は避けたい。 そんな不安を抱えながら情報収集している方も少なくありません。 実は、メーカー選定で失敗しないためには、…